Autonomy and Navigation – Research Findings¶
Summary¶
Three independent deep-research runs (OpenAI gpt-5.5-pro, Google Gemini Deep Research, Anthropic claude-opus-4-7, all queried on 28 May 2026) converge on eight anchor conclusions for the Autonomy and Navigation subtopic:
- IOC (2028–2030) is realistically Degree 2 (supervised autonomy with safety crew aboard + remote-control fallback). All three providers agree that Degree 3/4 uncrewed operation on international Mediterranean routes is not achievable before the mandatory MASS Code enters force (~2032). The project's IOC window falls within the non-mandatory Experience-Building Phase.
- The IMO MASS Code adopted at MSC 111 (May 2026) is the regulatory anchor. Non-mandatory, goal-based, effective 1 July 2026. Mandatory SOLAS MASS chapter targeted for adoption ~2030, entry into force 1 January 2032. The project timeline is aligned.
- DNV AROS (Jan 2025) is the most mature class notation framework for European autonomous RoRo. Modular functional categories (navigation, engineering, operational, safety) × control modes (remote control, decision support, supervised autonomy, full autonomy) × location (onboard, off-ship, hybrid). ClassNK strongest for large-vessel precedent (MEGURI2040/Hokuren Maru No. 2).
- Minimum-Risk Condition (MRC) architecture must be designed in from CONOPS phase. NMA (Norway) requires ≥2 MRCs during normal operation, ≥1 always available after casualty. MRCs are route-specific and must be defined per sector for Adriatic operations.
- Sensor architecture: marine radar-led + EO/IR + mmWave, with LIDAR confined to berthing envelope. LIDAR is weather-vulnerable for long-range. Multi-sensor fusion (radar + AIS + cameras + LIDAR) achieves ~94% detection in harsh weather; no single sensor is sufficient.
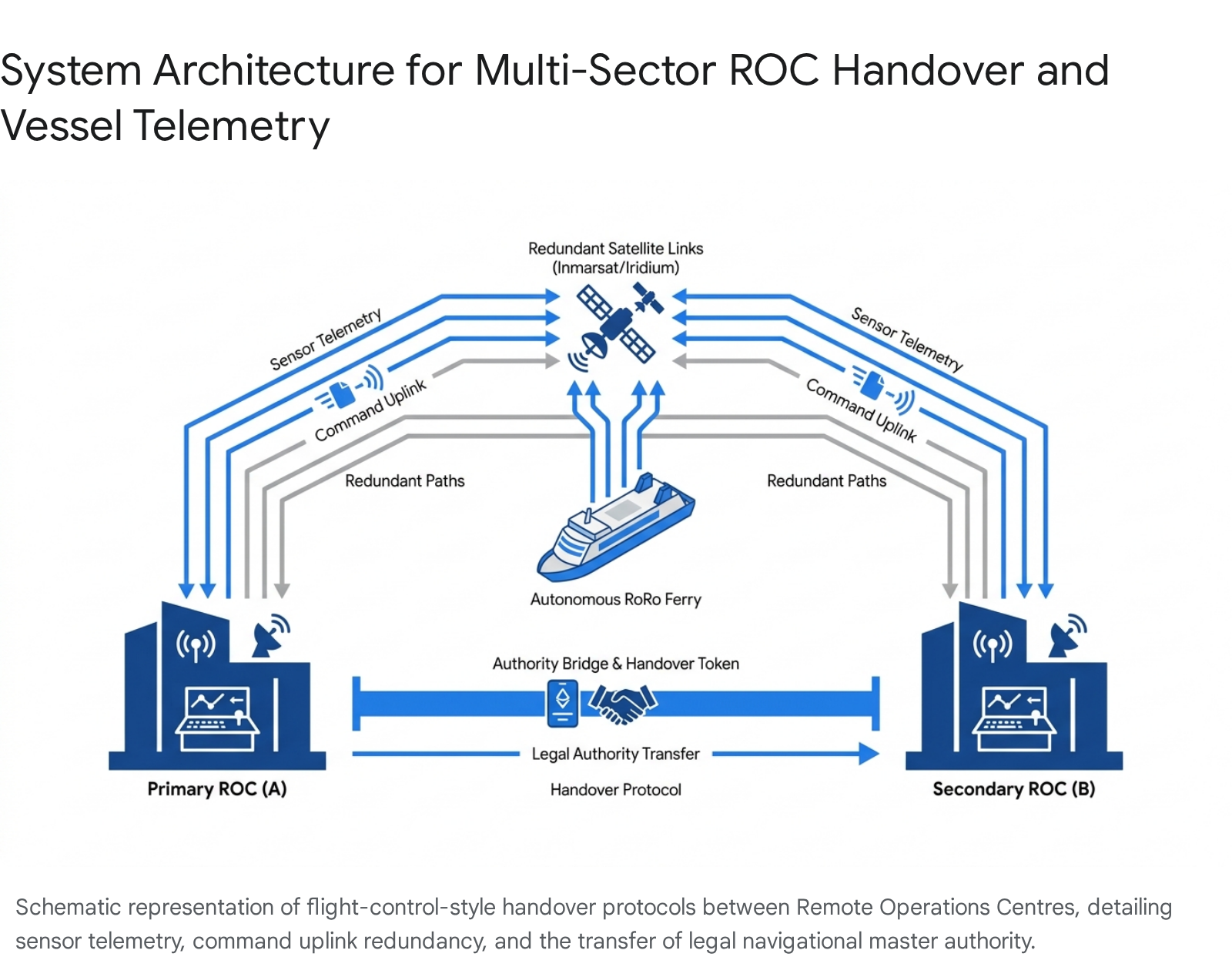
- Flight-control-style ROC handover lacks direct maritime precedent. The project will be breaking new ground; current autonomous vessels use single-centre per vessel. Aviation transfer-of-control principles (ICAO Doc 4444) provide the closest analogous protocol.
- Partner-country MASS regulation is the largest evidence gap. No published MASS-specific guidance found for Greece, Albania, Montenegro, Croatia, Slovenia, or Italy. Case-by-case flag-state approval is the realistic path; bilateral agreements needed for cross-border operations.
- Internal cyber-physical monitoring (cargo stability, EV fire detection) is as critical as external navigation for uncrewed RoRo. The absence of physical deckhands means autonomous cargo-stability monitoring is a primary safety function, not auxiliary.
Facts (Consolidated)¶
Each fact is attributed to the providers that returned it (A = Anthropic, G = Gemini, O = OpenAI). Facts are organized by research question.
1. Autonomy Levels at IOC vs FOC¶
-
IMO MASS taxonomy defines four degrees: Degree 1 = automated processes/decision support with seafarers on board; Degree 2 = remotely controlled ship with seafarers on board; Degree 3 = remotely controlled ship without seafarers; Degree 4 = fully autonomous ship. — Sources: A, G, O. IMO MSC.1/Circ.1638 [HIGH]
-
MSC 111 (May 2026) adopted the non-mandatory goal-based MASS Code, applicable to cargo ships, effective 1 July 2026; initiates Experience-Building Phase (EBP). — Sources: A, G, O. IMO press briefing; DNV MSC 111 [HIGH]
-
Mandatory MASS Code targeted for adoption by ~July 2030, entry into force 1 January 2032 as SOLAS amendment. — Sources: A, G, O. [HIGH]
-
IOC (2028–2030) is realistic as Degree 2 (crewed or safety-crewed supervised autonomy). Evidence from Yara Birkeland, ASKO, Finferries Falco, and Japanese MEGURI trials shows phased introduction with crew/safety crew first. Fully crewless operation achievable only on tightly bounded domestic routes with special approvals. — Sources: A, G, O. [MEDIUM]
-
FOC (2032–2035) can realistically target Degree 3 for defined corridors and Degree 4 for bounded functions. "Degree 4 everywhere, all weather, no supervision" is not the certification baseline; a more credible FOC is autonomous navigation/engineering within an approved ODD, with ROC supervision and remote-control fallback. — Sources: A, O. [MEDIUM]
-
Suggested milestones: 2026–2027 concept/safety case/ODD/class AiP/simulation/HIL; 2028 crewed small-ferry trials; 2029 remote-control trials with safety crew; 2030 limited uncrewed trials in one flag/coastal state; 2031–2032 medium-vessel cross-border approvals; 2033–2035 large RoRo Degree 3/4 ODD operation. — Source: O. [MEDIUM]
-
Class notations are function- and ODD-based, not simple whole-vessel "levels." Navigation, engineering, mooring, cargo/fire, communications and ROC functions may each have different autonomy maturity. — Sources: A, G, O. [HIGH]
-
The MASS Code mandates a human master retains overall responsibility at all times, whether onboard or operating from ROC. — Sources: A, G. [HIGH]
2. Certification Pathway¶
-
DNV AROS (Autonomous and Remotely Operated Ships) class notations launched January 2025, covering four functional categories (navigation, engineering, operational, safety) distinguished by modes (remote control, decision support, supervised autonomy, full autonomy) and control location (onboard, off-ship, hybrid). Built on DNV-CG-0264 risk-assessment guideline. — Sources: A, G, O. [HIGH]
-
For IOC, target DNV notations: AROS-NAV(SA) for "Supervised Autonomy" navigation, AROS-ENG(RC) for "Remote Control" of machinery, with Hybrid Control (HC) architecture allowing dynamic authority shifts. — Source: G. [MEDIUM]
-
Lloyd's Register ShipRight AL 1–AL 6 framework covering autonomy levels from basic automation through fully autonomous (no access required during mission). — Sources: A, O. [HIGH]
-
Bureau Veritas NI 641 Guidelines & SMART notations identify four degrees of automation for autonomous shipping. — Sources: A, O. [HIGH]
-
ABS Guide for Autonomous and Remote-Control Functions defines notations
AUTONOMOUSandREMOTE-CON. ABS granted AiP (late 2024) to HD Hyundai for unmanned ammonia engine room with AI-driven fault correction. — Sources: A, G, O. [HIGH] -
ClassNK "Guidelines for Automated/Autonomous Operation of Ships" (Ver. 2.0, 2023) — strongest for large-vessel autonomy due to MEGURI2040 and NYK/MTI trials. Hokuren Maru No. 2 (commercial RoRo) received MASS certification from ClassNK in early 2026. — Sources: A, G, O. [HIGH]
-
Normal certification path: CONOPS → ODD/operational envelope → regulatory gap analysis → hazard analysis → class AiP → technology qualification → simulation/HIL → crewed sea trials → remote-control trials → limited uncrewed trials → route approval. — Source: O. [HIGH]
-
Testing requirements include: scenario-based simulation, software-in-the-loop, hardware-in-the-loop, sensor replay, fault injection, cyber testing, shadow-mode operation, crewed sea trials, progressive removal of onboard intervention. — Sources: A, O. [HIGH]
-
Certification leverages IMO MSC.1/Circ.1455 "Guidelines for Approval of Alternatives and Equivalents" — requires demonstration that autonomous arrangements provide safety ≥ conventional crew. — Source: G. [HIGH]
-
ROC certification is not just IT approval. Must cover operator qualifications, watchkeeping, fatigue, handover, cybersecurity, loss-of-link procedures, HMI, alarm management, recording, emergency authority. MASS Code introduces MASS-ROC Certification structure. — Sources: A, G, O. [HIGH]
-
Flag-state receptiveness: Norway, Finland, Japan, Singapore, UK most mature. In Adriatic/Mediterranean, no partner country has public MASS regime as mature. Italy likely most technically receptive (RINA, large maritime administration) but no nationwide MASS code. — Sources: A, O. [MEDIUM]
3. Autonomy Mode Transitions and MRC¶
-
Norwegian Maritime Authority (NMA) Circular RSV 12-2020 requires: (a) minimum of two MRCs available during normal operation; (b) at least one MRC available at all times after fire, flooding, blackout, or loss of communication with ROC. — Source: A. NMA [HIGH]
-
Mode transitions governed by certified mode manager tied to ODD limits, system health, operator authority, and MRC logic. — Sources: G, O. [HIGH]
-
Automatic degradation triggers should include: sensor failure, localization uncertainty, comms degradation, propulsion/steering faults, cybersecurity alarms, weather outside ODD, traffic density outside ODD, COLREG ambiguity, remote-operator unavailability. — Sources: A, O. [HIGH]
-
Loss of communication should not automatically mean direct remote control. If bandwidth/latency insufficient for manual control, vessel should continue autonomous execution only in low-risk legs or enter MRC. — Source: O. [HIGH]
-
MRC for uncrewed RoRo is route-specific: may include slow-speed safe track, abort to holding area, loiter, anchor, maintain position, return to safe water, request tug assistance, or stop propulsion. In ports/narrow channels, MRC should be pre-surveyed emergency holding/anchoring/stop area — drifting is unacceptable due to RoRo windage. — Sources: A, O. [HIGH]
-
Authority transfer should use positive control: request, acknowledgement, capability check, transfer token, read-back and logging. Only one entity (autonomy stack, onboard crew, or ROC) holds manoeuvring authority at a time. Cryptographic logging of exact moment authority transfers. — Sources: G, O. [HIGH]
-
STPA (Systems-Theoretic Process Analysis) methodology recommended for identifying systemic risks in mode transitions; combined with ODD concept for safe control evaluation. — Sources: A, G. [HIGH]
4. Sensor Suite for Autonomous Navigation¶
-
SOLAS V/19 baseline navigation suite already requires: compass, GNSS/position fixing, echo sounder, radar, ARPA/ATA, AIS, ECDIS, speed/distance measuring, gyrocompass. — Source: O. [HIGH]
-
Autonomous RoRo suite adds: X-band + S-band radar, multi-constellation GNSS (with SBAS/RTK where available), INS/gyro, EO cameras, low-light cameras, thermal/IR cameras (PTZ), mmWave radar, LiDAR (near-field/docking), echo sounder, weather sensors, wave/current estimation, microphones/sound signal detection, VHF/DSC integration. — Sources: A, G, O. [HIGH]
-
Empirical autonomous ferry sensor evaluation (tm – Technisches Messen, 2025): mmWave radar + IR-PTZ cameras most weather-resilient; LiDAR suffers range/density loss in fog and rain; optimized multi-sensor configuration combining these technologies maximizes perception accuracy. — Source: A. [HIGH]
-
Multi-sensor fusion required; no single sensor sufficient. Radar drowns in clutter/misses small objects; AIS only tracks cooperative vessels; EO/IR fails in fog; LIDAR hates rain. Neural network fusion achieves ~94.7% detection in harsh weather. — Source: A. [MEDIUM — specific detection figure is vendor claim]
-
PNT resilience is a certification issue. Dual GNSS, SBAS/EGNOS, RTK/PPP near ports, INS, radar map matching, visual fixes, and spoofing/jamming detection required. — Source: O. [HIGH]
-
Sensor redundancy must be fail-operational: two independent radars, two heading sources, two position sources, independent power/network paths, overlapping camera sectors, health monitoring with confidence scoring. — Source: O. [MEDIUM]
-
Sensor fusion architecture is layered: raw sensor processing → object detection → multi-target tracking → world model → COLREG/risk assessment → trajectory planning → actuator command. — Sources: A, O. [MEDIUM]
-
For uncrewed RoRo, internal sensors equally critical: thermal cameras, smoke/heat/flame detection, gas detection (especially for EV lithium-ion off-gassing), bilge/flooding, watertight-door status, ventilation, battery/electrical monitoring, vibration/condition monitoring, CCTV, and cargo-stability strain gauges/accelerometers. — Sources: G, O. [HIGH]
-
VDES (VHF Data Exchange System) authorized at MSC 111, slated for mandatory 2028 — acts as secure, high-bandwidth alternative to traditional AIS, mitigating GPS spoofing through authenticated data exchange. — Source: G. [HIGH]
5. Flight-Control-Style Handover Between Operation Centres¶
-
No universally adopted maritime standard equivalent to ATC sector handover exists for autonomous ship ROCs. Current practice is project-specific and class-reviewed. — Sources: A, G, O. [HIGH]
-
Safest handover model is dual-monitor overlap: receiving ROC shadows vessel before boundary, reviews status, reads back route/ODD/alarms/traffic/weather, accepts authority token; sending ROC remains available through rollback period. — Sources: O. [MEDIUM]
-
JARUS guidelines (from unmanned aviation) and emerging maritime ROC frameworks inform handover protocols as pre-planned geographic or temporal events. — Source: G. [MEDIUM]
-
Handover should be prohibited during: berthing, close-quarters manoeuvres, unresolved alarms, cyber events, COLREG close-quarters encounters, or comms degradation (unless emergency transfer). — Source: O. [MEDIUM]
-
Communications should be multi-bearer: coastal 4G/5G, VSAT/LEO satellite for sea legs, L-band backup, VHF/DSC/GMDSS, secure IP networking. — Sources: A, O. [HIGH]
-
Indicative comms performance: supervisory autonomy can work with seconds-level latency and sub-Mbps to low-Mbps telemetry/video; direct remote manoeuvring needs much lower latency and multiple Mbps to tens of Mbps. No universal IMO number exists. — Source: O. [MEDIUM]
-
For Adriatic/Ionian routes, optimal sectors should be workload- and jurisdiction-based: port-sector/local-pilot sector plus 2–4 hour open-water sectors, with handovers in low-traffic open water. — Source: O. [LOW–MEDIUM]
-
Situational awareness during handover requires common operating picture: ECDIS route, AIS/radar tracks, camera/radar snapshots, weather, system health, autonomy mode, ODD margin, MRC options, unresolved operator notes, CHS status. — Sources: G, O. [HIGH]
-
DNV-ST-0324 and UK MCA MGN 703 prescribe competency requirements for ROC personnel: proficiency in AI systems, GMDSS, cyber risk management, fatigue management. — Source: G. [HIGH]
6. Minimum Viable Autonomy for Partner Countries¶
-
No harmonized EU or regional Adriatic/Ionian approval regime for crewless MASS. EU/EMSA work identifies regulatory gaps and case-by-case authorization. — Sources: A, G, O. [HIGH]
-
Greece: minimum viable IOC is onboard crew/safety crew with autonomous decision support; crewless requires Hellenic Coast Guard/Ministry route-specific permission. Greek authorities emphasize autonomous innovations must not undermine free trade or seafarer safety. — Sources: A, G, O. [LOW–MEDIUM]
-
Italy: likely most technically receptive (RINA, large maritime administration, industrial base); no public nationwide crewless MASS code; expect case-by-case Italian Coast Guard/MIT/RINA approval. — Sources: A, O. [LOW–MEDIUM]
-
Croatia: EU/SOLAS state with extensive ferry traffic; can support trials but likely requires safety crew at IOC, harbour master approvals, route-specific Ministry approval for uncrewed operation. 2022/2024 Italy-Croatia EEZ delimitation agreement enables regulatory continuity. — Sources: A, G, O. [LOW–MEDIUM]
-
Slovenia: short coastline, Port of Koper confined/busy approaches; local port/VTS/pilotage approval decisive; minimum IOC should assume safety crew. — Source: O. [LOW]
-
Montenegro: no mature public MASS framework; expect conventional manning unless special approval negotiated. — Sources: A, O. [LOW]
-
Albania: no mature public MASS framework; assume crewed/safety-crewed operation and case-by-case General Maritime Directorate approval. — Sources: A, O. [LOW]
-
Cross-border autonomous service requires bilateral or multilateral agreements covering: recognition of MASS certificates/equivalences, remote master/operator authority, VTS interfaces, SAR, incident investigation, pollution response, pilotage, customs/security, data sharing. — Sources: A, G, O. [HIGH]
-
2022/2024 Italy-Croatia EEZ Delimitation Agreement legally converts former high-seas gray zones into defined jurisdictional waters, establishing regulatory continuity for the North Adriatic — a potential incubator for cross-border MASS. — Source: G. [HIGH]
-
MASSPorts initiative and EU Operational Guidelines for MASS trials create standard terminology, communication formats, and ship-reporting guidelines for EU VTMIS Directive compliance. — Source: G. [MEDIUM]
7. SOLAS Obligations for Autonomous Vessels¶
-
SOLAS obligations do not disappear because the vessel is crewless. A cargo RoRo on international voyages remains a SOLAS ship. The MASS Code supplements but does not relax SOLAS requirements. — Sources: A, G, O. [HIGH]
-
SOLAS II-1 (construction/machinery/electrical): propulsion, steering, electrical power, watertight integrity, unattended machinery must be remotely monitored and fail-safe/fail-operational. — Source: O. [HIGH]
-
SOLAS II-2 (fire safety) is critical for uncrewed RoRo: ro-ro cargo spaces have known fire risks; crewless operation needs enhanced detection, fixed firefighting, ventilation control, drainage, thermal monitoring, remote command. EV thermal runaway is acute risk. — Sources: G, O. [HIGH]
-
SOLAS III (life-saving appliances): regulatory paradox for uncrewed vessels — physically carrying lifeboats no one is aboard to use. MASS Code shifts to goal-based functional requirements: MASS must still emit/receive/relay distress signals, maintain SAR integration. Flag-state exemptions and equivalent arrangements under SLS.14/Circ.153 needed until 2032. — Sources: G, O. [MEDIUM]
-
SOLAS IV (radiocommunications): ship still needs GMDSS distress alerting and watchkeeping capability; remote radio operation and automatic distress escalation must be flag-accepted. MSC 105 (2024) recognized Iridium alongside Inmarsat for GMDSS, removed legacy NBDP requirement. — Sources: G, O. [HIGH]
-
SOLAS V (navigation) is one of the hardest chapters for MASS. Proper lookout (Rule 5 "sight and hearing" equivalence), safe speed, voyage planning, bridge equipment, VDR, AIS, ECDIS, assistance to persons in distress, master's discretion, safe manning — all require interpretation or equivalent arrangements. — Sources: A, O. [HIGH]
-
SOLAS IX ISM and XI-2 ISPS/cybersecurity apply to company, ROC, and vessel. SMS must cover software updates, ROC operations, cyber risk, emergency procedures, remote authority. — Source: O. [HIGH]
-
Legal tools for approval: SOLAS I/5 equivalents, II-1/55 alternative design, II-2/17 alternative fire-safety design, III/38 alternative lifesaving design. — Source: O. [HIGH]
-
Unmanned MASS must be capable of assisting persons in distress (MSC 110 decision) — requires SAR operations plan even without crew. May require automated life-raft deployment capability. — Sources: A, G. [HIGH]
8. Navigation in Confined Waters¶
-
COLREGs apply to autonomous vessels unless and until amended. IMO RSE found COLREGs broadly applicable but identified interpretive issues for MASS. — Sources: A, O. [HIGH]
-
Rule 5 (proper lookout): autonomous lookout must provide equivalent to "sight and hearing as well as all available means" — supports cameras, radar, AIS, LiDAR, microphones, ROC monitoring. — Sources: A, O. [HIGH]
-
Confined-water autonomy must handle COLREGs Rules 6–10 and 19: safe speed, risk of collision, action to avoid collision, narrow channels, TSS, restricted visibility. — Source: O. [HIGH]
-
Port approaches require more than COLREGs. Local harbour rules, compulsory pilotage, VTS instructions, ferry priority practices, port ordinances must be encoded or managed by remote/local operators. — Sources: A, O. [HIGH]
-
COLREGs Rule 9 (Narrow Channels) compliance requires manoeuvrability-based situation awareness framework for autonomous vessels in confined waters. — Source: A. [HIGH]
-
Practical confined-water architecture: geofenced corridors, HD bathymetry/berth maps, speed limits, route monitoring, local collision avoidance, VTS interface, remote-control or remote-pilot support for berthing. — Sources: O. [MEDIUM]
-
Autonomous vessel interaction with manned traffic should be predictable and conventional: comply with COLREGs, standard lights/shapes/sound signals, VHF voice capability via ROC, broadcast AIS status. — Source: O. [HIGH]
-
Autodocking proven: Fjord1/HAV Group battery-powered RoRo ferries utilize purpose-designed architecture with responsive thrusters, GPS, LiDAR for fully automated berthing. MEGURI2040 Hokuren Maru No. 2 achieved 96% operational control rate in congested waters. — Source: G. [HIGH]
9. Operational Design Domain (ODD)¶
-
ODD is central to MASS safety assurance per Lloyd's Register research (2025). Must define acceptable weather, visibility, geography, and traffic conditions. — Sources: A, G, O. [HIGH]
-
ODD for autonomous RoRo must include: geographic limits, environmental boundaries, traffic complexity metrics, communications coverage, system-health thresholds, cargo restrictions, port conditions, rescue/tug availability, MRC locations. — Sources: A, O. [HIGH]
-
Indicative IOC ODD limits: no severe thunderstorms, no Bora/Scirocco/Meltemi extremes, validated visibility threshold, validated sea-state threshold, berth crosswind limit, comms coverage, tug/SAR availability, no unresolved sensor faults. Exact numbers vessel-specific. — Source: O. [MEDIUM]
-
Wind/gust limits especially important for RoRo due to high windage and large side area. Berthing crosswind may be more limiting than open-sea wave height. — Source: O. [MEDIUM]
-
ODD validation methodology: historical AIS traffic, metocean hindcasts, simulator campaigns, fault-injection tests, shadow-mode voyages, crewed trials, progressive operational release. — Source: O. [HIGH]
-
ODD expansion should be evidence-based: start with daylight/good-weather/low-traffic, then add night, restricted visibility, higher sea state, busier ports, cross-border operation, larger vessels — only after safety evidence accepted by class/flag/coastal states. — Sources: O. [HIGH]
-
STPA + ODD methodology proposed for autonomous ship verification (Reliability Engineering & System Safety, 2025). — Source: A. [HIGH]
-
If environmental sensors detect ODD breach (e.g., severe Bora winds), vessel's control logic must execute immediate fallback: speed reduction, ROC notification, prepare predefined MRC. — Source: G. [HIGH]
10. Existing Autonomous Vessel Projects and Lessons¶
-
Yara Birkeland (Norway): battery-electric container ship, 7–11 nm Herøya–Brevik route; supervised auto-docking and auto-crossing operational; still operating with crew aboard after 5+ years; mooring still manual; gradual shift to ROC planned. Lesson: even high-profile projects phase autonomy very slowly; short controlled fjord route is not analogous to Adriatic crossings. — Sources: A, G, O. [HIGH]
-
ASKO RoRo sea-drones (Marius & Therese, Norway): 67 m LOA, 16 trailers, battery-electric, Moss–Horten route, DNV-classed, automated mooring, remote operations centre in Horten. 2-year crewed trial period before uncrewed. Closest real-world freight analogue for this project. — Sources: A, O. [HIGH]
-
MEGURI2040 / Hokuren Maru No. 2 (Japan): commercial RoRo vessel carrying trucks/trailers; autonomous coastal navigation testing; MASS certification from ClassNK (early 2026); 96% operational control rate in congested waters. Most pertinent operational blueprint for large RoRo autonomy. — Sources: A, G. [HIGH]
-
Suzaku (NYK/MTI, Japan): 749-gt shortsea containership; 40 hours / 426 nm autonomous round-trip in congested waters; 98% autonomous voyage; equipped with Orca AI automated watchkeeper; satellite + ground comm link to fleet operation centre. — Source: A. [HIGH]
-
Finferries Falco / Rolls-Royce (Finland, 2018): demonstrated autonomous ferry navigation and remote control. Lesson: short fixed ferry routes are among the best first ODDs. — Sources: G, O. [HIGH]
-
Mayflower Autonomous Ship (IBM/Promare): ocean autonomy demonstrated; AI Captain proved environment assessment, hazard avoidance, situational awareness; hotfix software updates from shore. Lesson: mechanical reliability, weather, and recovery logistics as important as AI navigation. — Sources: A, O. [HIGH]
-
Sea Machines SM300: retrofit autonomy for commercial workboats/tugs; designed for GPS-denied/comms-denied environments; Bureau Veritas Type Approval for wireless control technology (2022). Lesson: retrofit autonomy reaches useful TRL but commercial acceptance remains staged. — Sources: A, O. [MEDIUM]
-
Fjord1 / HAV Group (Norway): four autonomous battery-powered ferries with autocrossing/autodocking; purpose-designed hull architecture integrated with electric propulsion and shore control platform. Lesson: effective autonomy requires "designing for autonomy" from keel up. — Source: G. [HIGH]
-
One Sea / EU AUTOSHIP: ecosystem/test-area approach shows regulation, data sharing, shore centres, ports, class, and operators must develop together. — Source: O. [HIGH]
-
MUNIN (EU FP7, 2012–2015): pioneered shore-control-centre and unmanned bridge/engine concept; showed technical feasibility but major regulatory/economic gaps. Integrated automated lookout + COLREGs-compliant navigation. — Sources: A, O. [HIGH]
-
Current TRL assessment: automated track-keeping/autodocking = TRL 8–9; autonomous collision avoidance in bounded ODD = TRL 6–8; crewless international RoRo in open commercial service = TRL 5–7; unsupervised all-weather Degree 4 = lower. — Source: O. [MEDIUM]
Key Insights (Cross-Provider Synthesis)¶
-
Regulatory clock is the binding constraint, not technology. The MASS Code EBP (2026–2030) and mandatory entry-into-force (2032) define the project timeline. IOC must use flag-state exemptions under the non-mandatory Code.
-
IOC should be framed as supervised autonomy with safety crew, not immediate crewless operation. This reduces regulatory risk, aligns with all proven project sequencing (Yara, ASKO, MEGURI), and matches IMO Degree 2.
-
The certifiable product is not just a ship — it is ship + ROC + communications + port infrastructure + ODD + emergency response system. Certification covers the entire system-of-systems.
-
Navigation autonomy is not the hardest problem for an uncrewed RoRo. Fire safety, machinery recovery, cargo hazards (especially EV thermal runaway), maintenance, and damage control may drive the certification timeline more than COLREGs compliance.
-
Choose DNV AROS + Hybrid Control as primary regulatory pathway. Allows commercial operations during EBP while pushing autonomy boundaries. ClassNK for large-vessel precedent; RINA/BV for Mediterranean acceptance.
-
MRC architecture and ODD parameterization are design drivers, not afterthoughts. Sensor suite, redundancy, fire systems, comms, MRC locations, and port infrastructure should drive vessel design from CONOPS phase.
-
Remote manual control should be a fallback for high-awareness situations, not the primary safety case. If comms fail, the real fallback is autonomous MRC execution, not remote joystick.
-
Cross-border operation is a governance problem as much as a technical one. The Italy-Croatia EEZ agreement and EUSAIR framework provide political foundations; bilateral agreements with coastal/port states should begin before vessel construction.
-
Flight-control-style ROC handover is project-original and needs early prototyping. Simulate in small-ferry CONOPS phase; produce evidence for IMO EBP submissions. Use aviation transfer-of-control principles as starting framework.
-
Internal cargo monitoring (stability + fire) is a primary autonomy pillar. Strain gauges, thermal imaging, gas sniffers for EV off-gassing must feed directly into core autonomy logic and ROC dashboard, compensating for absence of deck patrols.
Contradictions and Gaps¶
| Area | Issue | Providers |
|---|---|---|
| IMO Degree mapping | Project's "Degree 2 supervised with remote fallback" may actually be Degree 3 if no seafarers aboard at FOC. Terminology should be harmonized early. | O |
| Yara Birkeland route length | Baird Maritime reports 7 nm; Yara says 11 nm. Likely port-to-port vs. navigable waterway distance. Either way, not analogous to 20–100 nm Adriatic crossings. | A |
| Partner-country MASS regulation | No published MASS-specific guidance from any of the six partner countries. Norway/Finland are models but project states are not. Material gap requiring direct outreach. | A, G, O |
| ROC multi-state certification | MASS Code requires ROC certification by flag administration. Multi-sector handover between ROCs in different flag states not addressed in any source. | A, O |
| Latency requirements | No universal IMO number for remote-control latency. Automotive teleoperation uses <150 ms; maritime supervisory control may tolerate 500–1000 ms — not standardized. | A, O |
| SOLAS Ch. III paradox | Prescriptive lifeboat requirements for vessel with no one aboard to use them. Exact mechanism for permanent exemption remains fragmented. | G, O |
| Liability in latency-induced accidents | If AI makes erratic maneuver and operator cannot override due to satellite latency, liability allocation between software developer, shipowner, remote master is legally untested. | G |
| Vendor TRL claims | Sea Machines' detection rates and deployment figures are self-reports; independent TRL audits sparse. | A |
| Adriatic-specific sensor performance | Empirical sensor study (2025) used Northern European waters; Adriatic summer haze and Bora-driven sea states not directly characterized. | A |
| Uncrewed RoRo fire response | No commercial precedent; EVs, refrigerated trailers, dangerous goods greatly complicate the safety case. | G, O |
| Insurance/P&I for Degree 3/4 | MASS Code Legal Committee work has not closed the insurance gap for crewless international RoRo. | A, O |
Open Questions¶
- Will the ferry carry only unaccompanied trailers, or also drivers/passengers? (If >12 passengers → passenger ship → far more complex SOLAS obligations)
- Which flag state and class society will be selected for the first vessel?
- What exact pilot route will define the initial ODD?
- What latency budget is workable for ROC supervisory control in confined Adriatic ports?
- How is "master in charge" satisfied under UNCLOS Article 94 when control passes between ROCs in different states mid-voyage?
- What insurance market exists for Degree-3/4 RoRo carrying ~44 t road-legal trailers?
- How will remote operators be trained, certified, scheduled, and medically qualified?
- What dangerous goods, EVs, or refrigerated trailers will be allowed at IOC?
- How will port state control authorities physically/digitally inspect an uncrewed ferry?
- What Mediterranean-specific COLREGs-equivalent practices must the autonomous system encode?
- How does the "obligation to assist persons in distress" translate to a 300-trailer RoRo without crew — automated life-raft deployment, chase boat, SAR contract?
- Are there Adriatic-specific Bora/Scirocco metocean data sets validated for ODD parameterization?
Recommendations (Consolidated)¶
-
Anchor IOC certification on DNV AROS (Navigation – Supervised Autonomy, Hybrid Control) with experienced flag state. Map to IMO MASS Code Degree 2. Plan documented migration to AROS "Full Autonomy" at FOC aligned with mandatory MASS Code (2032). Consider Norwegian or Maltese flag for regulatory template; reserve Greek/Italian flag for operational phase once national guidance published.
-
Adopt Norwegian-style "two MRCs always available" architecture from CONOPS phase, formalized per sector. For each Adriatic/Ionian sector, predefine: (a) dynamic MRC (loiter outside TSS), (b) static MRC (designated anchorage/return-to-last-port), (c) emergency MRC (controlled grounding zone). Validate each in simulation and sea trial during small-ferry CONOPS.
-
Lead sensor architecture with marine X-band/S-band radar + mmWave radar + EO/IR PTZ cameras for primary perception; restrict LIDAR to berthing envelope (<200 m); treat AIS as cooperative-only. Integrate VDES for authenticated telemetry. Plan graceful degradation rules tied to visibility/sea-state bands with documented sensor-degradation MRC ladder.
-
Design ROC architecture around single-flag certification model first, then prototype multi-sector handover as research extension. For medium-ferry benchmark, treat entire route as single ROC's responsibility. Use small-ferry CONOPS phase to simulate flight-control-style handover and produce evidence for IMO EBP submissions. Use JARUS/ICAO transfer-of-control principles as protocol foundation.
-
Establish SOLAS-equivalence dossiers per chapter early. Specifically: II-1/II-2 (fixed fire detection/suppression + cargo-deck thermal/gas monitoring in lieu of patrols); III (justified LSA arrangement for uncrewed + automated distress/SAR capability); IV (autonomous GMDSS watch via ROC); V (electronic lookout as "all available means"). Engage DNV and BV in parallel pre-application reviews.
-
Integrate cargo structural monitoring as primary autonomy node. Deploy strain gauges, accelerometers, thermal imaging, gas sniffers on RoRo decks. Feed directly into core autonomy logic — autonomous speed reduction or course alteration on cargo-shift or thermal-runaway detection. Not auxiliary alarm; primary safety function.
-
Initiate Pan-Adriatic regulatory corridor work via EUSAIR. Establish joint working group with Italian, Croatian, Greek maritime authorities. Develop standardized handover protocol; leverage Italy-Croatia EEZ agreement. Begin bilateral agreement negotiations before vessel construction.
Confidence Assessment (by Research Question)¶
| RQ | Topic | Confidence | Justification |
|---|---|---|---|
| 1 | Autonomy levels IOC vs FOC | 8/10 | MASS Code timeline, degrees, and class notations well-documented. Specific TRL by year carries estimation risk. |
| 2 | Certification pathway | 8/10 | Class pathways clear (DNV AROS, ClassNK MEGURI). National MASS approval practice still evolving. |
| 3 | Mode transitions / MRC | 7/10 | NMA guidance provides solid framework; numeric thresholds are project/route-specific. ROC-to-ROC handover triggers not standardized. |
| 4 | Sensor suite | 8/10 | Required sensors and limitations well understood; empirical ferry study provides validation. Adriatic-specific data missing. |
| 5 | ROC handover | 5/10 | No maritime precedent for sectoral handover; JARUS/ICAO provide analogous principles. Project will define new ground. |
| 6 | Partner-country approval | 3/10 | Largest gap. No MASS-specific positions found from any of 6 partner states. Field interviews with maritime authorities required. |
| 7 | SOLAS obligations | 8/10 | SOLAS impacts clear; MSC 110/111 statements explicit. Chapter-by-chapter equivalences remain individually negotiated. |
| 8 | Confined-water navigation | 8/10 | COLREGs/VTS obligations clear; autodocking proven (Fjord1, MEGURI). Adriatic-specific algorithmic validation needed. |
| 9 | ODD definition | 7/10 | ODD framework established; Adriatic-specific parameterization not yet published. Depends on vessel/route trials. |
| 10 | Existing projects | 9/10 | Extensive documentation from Yara, ASKO, MEGURI, Fjord1, Mayflower, Sea Machines, MUNIN. TRL estimates partly judgment-based. |
Overall research confidence: 7.1/10 — Strong on global regulatory framework, class notation, sensor technology, and reference projects. Weak on partner-state national regulation and flight-control-style ROC handover (project-original concept). Priority gap-closure: field interviews with Hellenic Coast Guard, Italian Coast Guard, Croatian Maritime Safety Directorate, and EMSA.
 Source: Generated by Gemini Deep Research, 2026-05-28
Source: Generated by Gemini Deep Research, 2026-05-28
Source Index¶
IMO Instruments and Resolutions¶
| Ref | Source | URL |
|---|---|---|
| IMO MASS Code | MSC 111 adopted non-mandatory MASS Code, May 2026 | https://www.imo.org/en/mediacentre/pressbriefings/pages/imo-adopts-mass-code.aspx |
| IMO MSC.1/Circ.1638 | Outcome of the Regulatory Scoping Exercise for MASS, 2021 | https://www.imo.org/en/MediaCentre/HotTopics/Pages/Autonomous-shipping.aspx |
| IMO MSC.1/Circ.1455 | Guidelines for Approval of Alternatives and Equivalents | https://www.imo.org/en/OurWork/Safety/Pages/Approval-of-alternatives-and-equivalents.aspx |
| IMO COLREG 1972 | Convention on the International Regulations for Preventing Collisions at Sea | https://www.imo.org/en/About/Conventions/Pages/COLREG.aspx |
| SOLAS 1974 | International Convention for the Safety of Life at Sea | https://www.imo.org/en/About/Conventions/Pages/International-Convention-for-the-Safety-of-Life-at-Sea-(SOLAS),-1974.aspx |
| IMO Res. A.1158(32) | VTS Guidelines, 2021 | — |
| ICAO Doc 4444 | Procedures for Air Navigation Services — Air Traffic Management (PANS-ATM) | — |
Class Society Guidelines and Notations¶
| Ref | Source | URL |
|---|---|---|
| DNV-CG-0264 | Autonomous and Remotely Operated Ships (class guideline) | https://rules.dnv.com/docs/pdf/DNV/CG/2021-09/DNV-CG-0264.pdf |
| DNV AROS | Autonomous and Remotely Operated Ships class notations (Jan 2025) | https://www.dnv.com/news/2026/imo-mcs-111-new-mass-code-adopted/ |
| DNV-ST-0324 | Standard for ROC personnel competency | — |
| DNV-RP-A203 | Technology Qualification | — |
| ABS Guide | Guide for Autonomous and Remote-Control Functions, 2021/2023 | https://ww2.eagle.org/en/rules-and-resources/rules-and-guides.html |
| BV NI 641 | Guidelines for Autonomous Shipping, 2017/2019/2023 | https://marine-offshore.bureauveritas.com/rule-notes-and-guidance-notes/ni641-guidelines-autonomous-shipping |
| LR ShipRight | Design Code for Unmanned Marine Systems; CES AL0–AL6 | https://www.lr.org/en/knowledge/research-reports/cyber-enabled-ships-shipright-procedure/ |
| ClassNK | Guidelines for Automated/Autonomous Operation of Ships, Ver. 2.0, 2023 | https://www.classnk.or.jp/hp/en/activities/statutory/autonomous/ |
National Maritime Authority Guidance¶
| Ref | Source | URL |
|---|---|---|
| NMA RSV 12-2020 | Norwegian Maritime Authority — Guidance for unmanned/partially unmanned operations | https://www.sdir.no/en/regelverk/circulars/guidance-in-connection-with-the-construction-or-installation-of-automated-functionality-aimed-at-performing-unmanned-or-partially-unmanned-operations/ |
| UK MCA MGN 703 | Maritime and Coastguard Agency — UK Code of Practice for MASS | https://www.gov.uk/government/publications/mgn-703-mf-uk-code-of-practice-for-mass |
EU Legislation and Frameworks¶
| Ref | Source | URL |
|---|---|---|
| EMSA SAFEMASS | Study of Risks and Regulatory Issues of Specific Cases of MASS, 2020 | — |
| MASSPorts | EU initiative for port-MASS interoperability | — |
| EUSAIR | EU Strategy for the Adriatic and Ionian Region | https://www.adriatic-ionian.eu/ |
| Italy-Croatia EEZ Agreement | Delimitation of Exclusive Economic Zones, 2022/2024 | — |
Research Projects and Demonstrations¶
| Ref | Source | URL |
|---|---|---|
| Yara Birkeland | Autonomous container ship, Herøya–Brevik, 2021– | https://www.yara.com/news-and-media/news/archive/2021/yara-birkeland-press-kit/ |
| ASKO sea-drones | Kongsberg/Massterly autonomous RoRo, Moss–Horten | https://www.kongsberg.com/maritime/news-and-events/news-archive/2022/world-first-autonomous-electric-freight-ferries-for-asko/ |
| MEGURI2040 / Hokuren Maru No. 2 | Nippon Foundation autonomous RoRo programme, Japan | https://www.nippon-foundation.or.jp/en/what/projects/meguri2040 |
| Suzaku (NYK/MTI) | 749-gt autonomous containership, 426 nm trial | — |
| Finferries Falco | Rolls-Royce autonomous ferry demonstration, Finland, 2018 | — |
| Mayflower Autonomous Ship | IBM/Promare ocean autonomy, 2021–2022 | https://mas400.com |
| Sea Machines SM300 | Retrofit autonomy system; BV Type Approved 2022 | — |
| Fjord1 / HAV Group | Autonomous double-ended battery ferries, Norway | — |
| MUNIN | EU FP7 unmanned ship concept, 2012–2015 | http://www.unmanned-ship.org/munin/ |
| One Sea | Finnish autonomous maritime ecosystem | https://www.oneseaecosystem.net/ |
| EU AUTOSHIP | H2020 autonomous shipping project (CORDIS 815012) | — |
| Rolls-Royce AAWA | Advanced Autonomous Waterborne Applications Initiative | — |
Academic and Industry Publications¶
| Ref | Source | URL |
|---|---|---|
| tm – Technisches Messen, 2025 | Empirical ferry sensor evaluation: mmWave radar + IR-PTZ | — |
| Reliability Engineering & System Safety, 2025 | STPA + ODD methodology for autonomous ship verification | — |
| LR Research Reports 2025 | ODD and Operational Envelope for MASS safety assurance | https://www.lr.org/en/knowledge/research-reports/ |
| IFAC ScienceDirect | COLREGs Rule 9 situation awareness framework | — |
| Tandfonline 2025 | UNCLOS and ROC-based MASS operation legal analysis | — |
| ResearchGate 2025 | ROC connectivity-manager concept and satellite cost constraints | — |
| AILiveSim | Multi-sensor fusion for autonomous ships (industry analysis) | — |
Standards¶
| Ref | Source | URL |
|---|---|---|
| JARUS | Joint Authorities for Rulemaking on Unmanned Systems (aviation/UAS handover) | https://www.jarus-rpas.org/ |
| ISO MRC definition | ISO 2020 — Minimum-Risk Condition for automated systems | — |
Related Documents¶
- Autonomy and Navigation (findings)
- Autonomous RoRo Ferry Platform – Research Findings
- Ship Systems Architecture (topic source not published in wiki)
- Operation Centres and Labour Model (topic source not published in wiki)
- C4ISR, Communications, and Surveillance (topic source not published in wiki)
Provider Details¶
| Provider | Model | Chars | Status |
|---|---|---|---|
| Anthropic | claude-opus-4-7 | 36,225 | Complete |
| OpenAI | gpt-5.5-pro | 34,471 | Complete (partial — TPM rate limit) |
| Google Gemini | deep-research-preview-04-2026 | 53,390 | Complete (+1 image) |
Raw responses archived in .tmp/ (git-ignored).